
Today for Tech Thursday we are discussing chain coupling for wheeled robots. Chain coupling allows for a better 4WD system even if you are already using a motor per wheel. This is because each wheel is powered by two motors. It won’t make a difference if you are driving on level terrain but if you start driving in rougher terrain where a wheel might come off of the ground it will help immensely. With one wheel off of the ground, the coupled wheel has double the power. Chain coupling can also allow you to have a 4WD robot with only two motors. We offer chain coupling in all of our assembled wheeled robots. If you have a robot that you would like chain coupled, read on to figure out what parts you will need and how to install them.
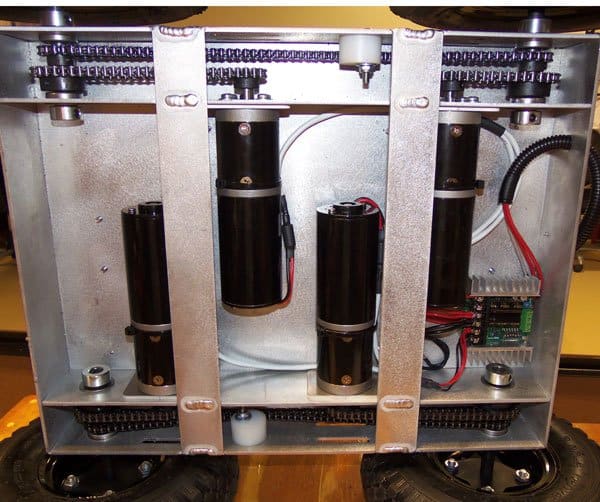
We use a 1:1 gear ratio and #25 chain and sprockets, just like the drive system. Once we install the chain we must find a way to tension it since our wheel base is not adjustable. To do this we use a piece of round plastic as our tensioner and mount it so that it pushes the slack out of the chain. We drill an off-center hole in the block and mount it to the chassis, as shown. The off-center hole allows us to “cam” the block for tension adjustment. We use UHMW Polyethylene as the material since it has great wear resistance.

Below is another example of a tensioner that we used in a robot with two wheel chair motors. For this one we mounted the tensioner block on a swing arm to get more adjustment and more clamping force. This is for our new 4WD WC chassis.


#techthursday #chain #ATR

{kind=link}