This topic has 8 replies, 2 voices, and was last updated 10 years, 1 month ago by ![]() mahadh92.
mahadh92.
- AuthorPosts
- March 19, 2015 at 11:24 am #2169
 mahadh92Participant
mahadh92Participanthello,
i have bought the
RoboteQ SDC2150 – 2x20A 50V Motor Controller with Encoder Input
and the
IG42 24VDC 122 RPM Gear Motor with Encoder
with the
IG32, IG42, and IG52 Gear Motor Encoder Pull-up Board.and connected the pullup board to the motor.
how should i connect it to the motor controller?
should i give it power? or is the power coming from the motor?
is there anyone can help showing me how to make the connection?
i wanna have some values from the encoder.Thank you
March 19, 2015 at 12:28 pm #2170 SuperDroidKeymaster
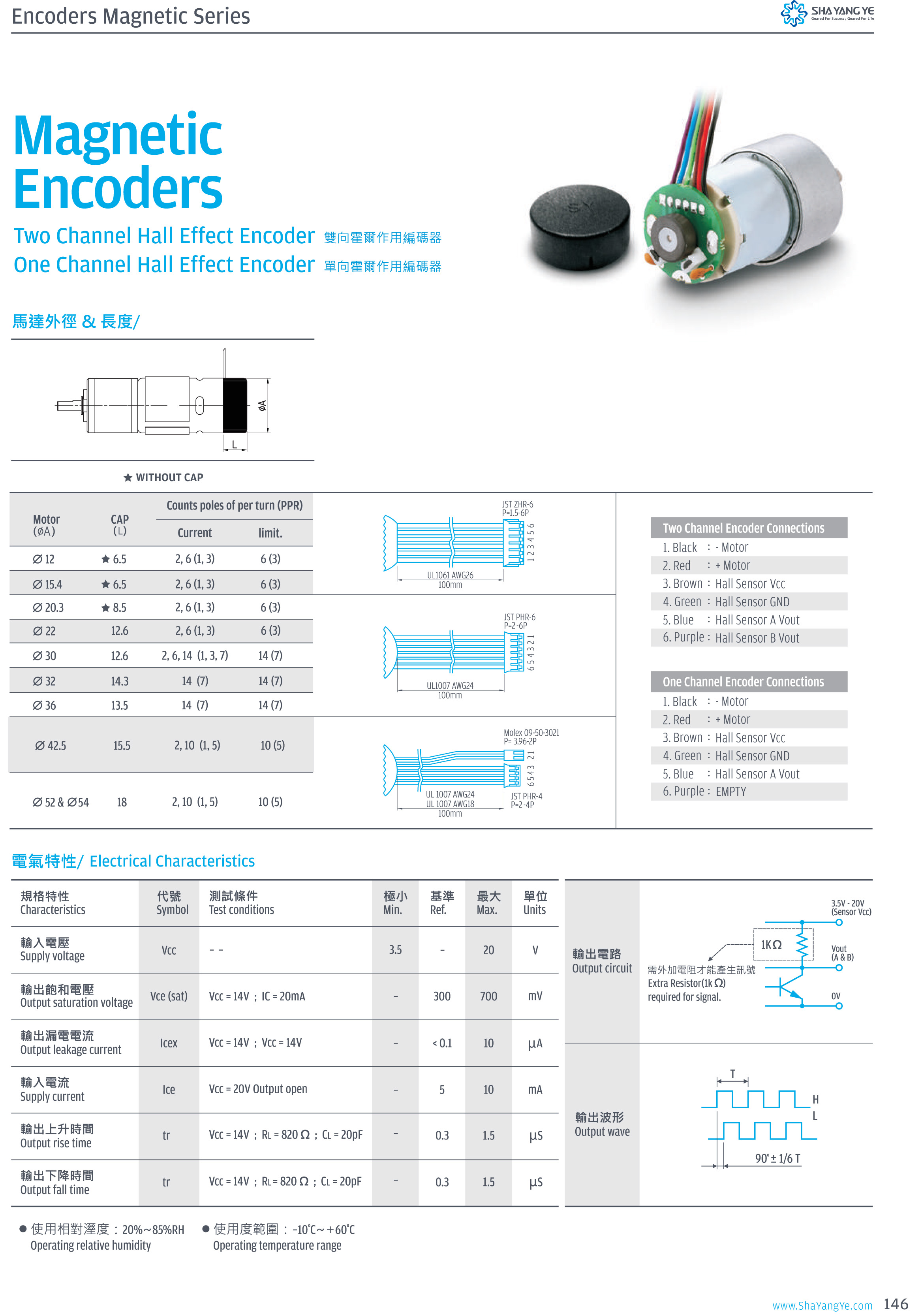
SuperDroidKeymasterThe poles per turn is at the motor. The motors vary, you should verify upon receipt. If you look at the encoder data sheet the poles can be several different configurations http://www.superdroidrobots.com/images/encoder-datasheet.jpg. Also depends if you are reading both channels and/or quadrature. tho verify a scope is easiest, but you can use the RoboRun with the RoboteQ, just spin the motors around a set number of times and see what your encoder count is…
related blog topic: https://sdrobots.com/ig3242-52-encoder-interfacing-cpr-calculation/
#encoders
March 20, 2015 at 11:55 am #2184 mahadh92Participantok when i move the motors using the sliders.. nothing happens.
when i move the pullup board .. i get some values.
should i install the board in a specific way? where? there’s no much documentation about this stuffMarch 20, 2015 at 12:02 pm #2185 mahadh92Participantis there any video showing where to install the board ? i think it has a photo transistor or so
March 20, 2015 at 12:27 pm #2186 SuperDroidKeymasterAs seen in the datasheet below there are six total wires/terminals on the motors.
1. Black – Motor Power Negative
2. Red – Motor Power Positive3. Brown – Hall Sensor Power
4. Green – Hall Sensor Ground
5. Blue – Hall Sensor – A Channel
6. Purple – Hall Sensor – B ChannelThe Encoder Pull-Up board has two connectors on each side. The smaller header has a 2.0mm pitch and will mate directly with the encoder connector on the motor. Be sure to match up the pins properly. The pin marked V is encoder power, G is encoder ground, B is B channel and A is A channel. The opposite side needs to be wired into the DB15 connector on your RoboteQ motor controller.
To determine the connections on the RoboteQ you will need to refer to their datasheet. According to the datasheet below you will need to connect the “V” pin on the Encoder Pull-Up board to pin 14 (which is 5V Output). The “G” pin needs to be connected to either pin 5 or 13 (Ground). You will need to be sure you match up your encoder pulses to the proper channel. The motor connected to the M1 output terminals will need to be connected to pins 4 and 8 on the RoboteQ’s DB15 connector. The motor connected to M2 needs to be connected to pins 10 and 15 on the DB15 connector.
March 20, 2015 at 12:39 pm #2188 mahadh92Participantyes thank u i already did all of that.. the problem is that i get some values only when i move the pullup board with my hand… that’s why i’m asking where should i install it in order to feel the rotations of the motor?
March 20, 2015 at 1:04 pm #2189 SuperDroidKeymasterIf you’re only getting pulse changes when you physically move the encoder board then it sounds like it’s a wiring or solder issue.
How do you have the wires connected to the RoboteQ’s DB15? If you just have wires stabbed into it and not using a crimp or solder-cup connector then you most likely do not have a solid electrical connection.
When the motor rotates you should be able to see the counts change in RoboRun. You can always verify that the encoders are pulsing correctly by using an oscilloscope and probing the A and B channels out of the encoder.
If you need assistance configuring the RoboRun utility. I would suggest asking on RoboteQ’s forums located here.
March 20, 2015 at 1:12 pm #2192 mahadh92Participantthank u so much.. yes i only have the wires stabbed into DB15.
thank u so much for the help.
i will check them.March 20, 2015 at 1:50 pm #2193 mahadh92Participanti found the solution of the problem.
the problem is that the datasheet shows the purple should go with channel B and blue with A.
but the motors that we received provide an opposite connection such as the one shows on this picture:
http://www.superdroidrobots.com/images/TE-179-000-C.jpgi changed the channels wires and things are working great now.
thank u !
- AuthorPosts
{kind=link}
{kind=link}
{kind=link}
{kind=link}
You must be logged in to reply to this topic.