This topic has 3 replies, 2 voices, and was last updated 8 years, 8 months ago by ![]()
![]() SuperDroid.
SuperDroid.
- AuthorPosts
- August 12, 2016 at 3:03 pm #3624
 TaylorParticipant
TaylorParticipantHello,
Thank you for taking the time to read my post. This is my first time posting to the forums so I will try to be as specific as I can be with my questions.
I am planning to use the 4WD All Terrain Robot Platform as the base for my robot. Please view the link below to view the platform. I have a few general questions to begin with. If you have had any experience with these type of questions, I would love to hear your input.
http://www.superdroidrobots.com/shop/item.aspx/4wd-all-terrain-robot-platform-ig42-sb/1474/
1) Is it possible to use an Arduino Mega 2560 Rev3 Microcontroller to control this platform?
2) The platform is 28 pounds by itself. I plan to mount a 12 pound stand and other equipment on top of this platform, for a total of roughly 20 pounds to be safe. Will the Sabertooth Dual 12A RC Motor Driver be enough to handle this or should I consider getting better one, such as the 60A one?
3)The motors themselves are connected to the motor controller, correct? If so, I should be able to control the Sabertooth motor controller via the arduino microcontroller, correct?
4) I plan to get the IG42 24VDC 078 RPM Gear Motor with Encoder for this platform. Is there a way or resource to compute how fast the robot will go at max speed? I know that I can control the speed by controlling the amount of power sent to the motors, but I need to know a rough idea of how fast this thing is capable of.
5) I plan to purchase the 24V 10000 mAHr NiMH Battery Pack. The documentation states that this platform can run for 1.5 – 3 hours. Does that hold true for this battery?
6) Finally, regarding the setup of the system, please let me know if I have this correct: The motors themselves are already connected to the sabertooth motor controller. I should be able to connect the arduino mega microcontroller to the motor controller to be able to programatically control the platform, correct? I should be able to connect the battery, motors and arduino to a breadboard and work out the circuitry that way, correct?
Thank you.
August 15, 2016 at 12:04 pm #3648 SuperDroidKeymaster
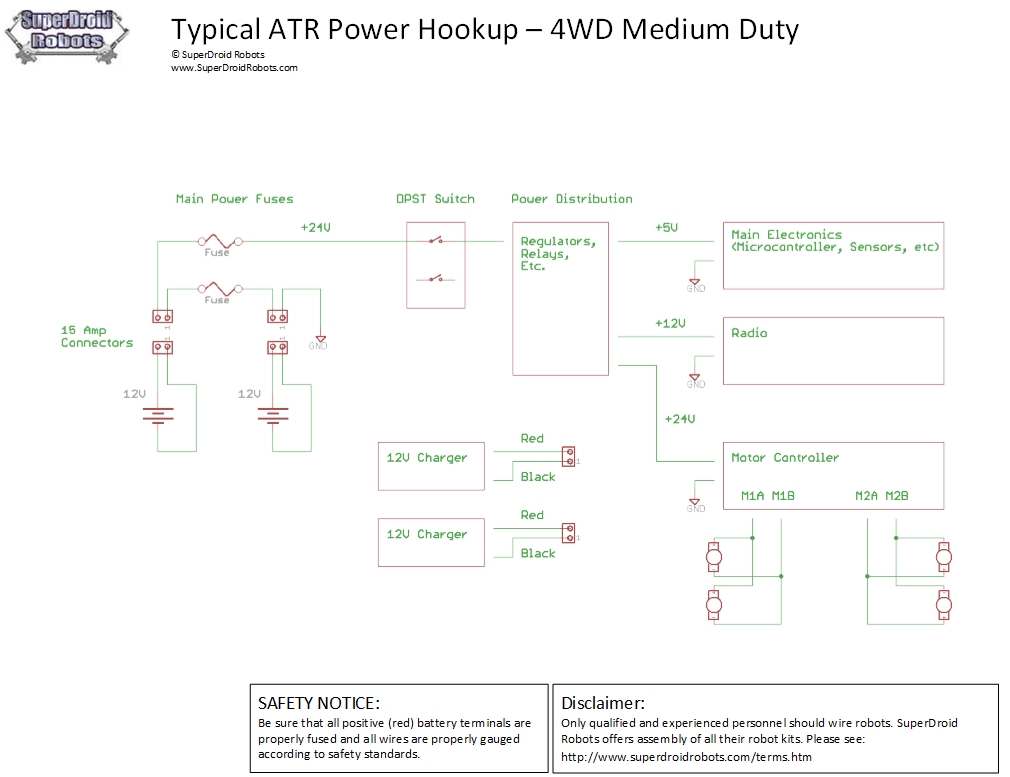
SuperDroidKeymasterYes, the Arduino can control this platform. It will interface directly with the motor controller to drive the motors. You put the two left motors on one channel and the two right motors on the other channel. You will want to use the Sabertooth 2×25 or 2×32, the 2×12 RC is limited in its interface and will be undersized with a 20lb load. You can also use a RoboteQ motor controller. See our support pages for more detail. http://www.superdroidrobots.com/shop/custom.aspx/robot-electrical-power-and-wiring/53/ and our micro controller support page http://www.superdroidrobots.com/shop/custom.aspx/microcontrollers/10/
A speed calculator is on this support page: http://www.superdroidrobots.com/shop/custom.aspx/how-to-build-a-robot/70/#motors
Battery consumption really depends on how you use the robot. Turning in high friction areas with a heavy load take the most current. Driving a flat smooth surface without turning is easiest. Typically you will draw about 4 Amps/hr on average with a IG42 platform, but rough terrain and a lot of turns will bring this number much higher. if you run 4 Amps continuously at 100% on a 10Ahr battery, you will get about 2.5 hours… run it at 50% duty cycle and you will get about 5 hours.
The sabertooth has a regulator on it, but 24V is too much for it. You should probably use a regulator that is rated for the 24V to power it. You can use a 12V regulator and feed into the arduino input, or you can use a 5V regulator and bypass the arduino regulator and apply the power straight to a 5V pin on the arduino.
August 15, 2016 at 3:51 pm #3655 TaylorParticipantThank you for the information. I have a few questions based on the new information presented:
I will be following this diagram that I found from the link you provided: http://www.superdroidrobots.com/images/ATR_4WD.jpg
That should work for the conditions I described previously, correct?1) Could you provide me with an example regular that I would need to power the arduino and motor controllers?
2) If the motor controller takes 24V and the arduino takes 5V, would that be 29V? Would that make the battery drain faster? You mentioned in your reply that the sabertooth motor could not take 24V. If I have the 2×32 motor controller, will the 24V still be too much for it?
3) Also, this may be an obvious question, but will the 2×32 sabertooth motor controller control all 4 motors? You mentioned that I could put two on one channel and two on the other. By doing this, is it possible to control all 4 with one motor controller, but the offset would be reduced speed?
4) Could you provide an example of the type of 15 amp connector I would need? I will have a 24V battery and I am not sure how to hook it up to the regulator.
Thank you for your help. I am learning a lot.
August 15, 2016 at 4:06 pm #3657 SuperDroidKeymasterWe are in the process of updating the support pages and adding a lot of schematics. The best thing is to send in a custom robot request and let us know what you need and have us assemble it. The arduino gets its power from the same 24V source the motors do, it does not add to 29V??? You can not hook the arduino straight to 24V, the regulator is not rated for it, you have to step it down. From the sounds of things this is your first time project and it’s going to just give you a ton of issues and you are probably going to burn out a lot of components, sorry. There are so many things to know how to do and make sure its right or magic smoke will come out of you expensive components… Our electrical support page has lots of the answers you are looking for as far as the connectors and motor hookup, etc. http://www.superdroidrobots.com/shop/custom.aspx/robot-electrical-power-and-wiring/53/
For a custom robot quote please fill out: http://www.superdroidrobots.com/shop/custom.aspx/custom-robot-request/87/
- AuthorPosts
{kind=link}
You must be logged in to reply to this topic.