@sdr


SuperDroid replied to the topic LSU Senior Design Custom Design Robot. Need Custom Tracks in the forum Mechanical Design 6 years, 1 month ago
Custom tracks are very very expensive. A mold charge will be required, etc. The only thing we have is listed here, in which you have to splice the track to length and make your own cleats, etc. for tracking. https://www.superdroidrobots.com/shop/category.aspx/diy-wheels-tracks-and-treads/162/
-
SuperDroid wrote a new post 6 years, 1 month ago
OCR2018 Live Crisis Response Training

 Operation Convergent Response 2018 (OCR2018), a second annual live scenario event that puts the latest crisis response innovations in first responders’ h
Operation Convergent Response 2018 (OCR2018), a second annual live scenario event that puts the latest crisis response innovations in first responders’ h -
SuperDroid wrote a new post 6 years, 1 month ago
How to Configure a RoboClaw Motor Controller with Velocity Control
In this example we are going to show how to configure a RoboClaw Motor Controller with velocity control. We used two RoboClaw 2x7A Motor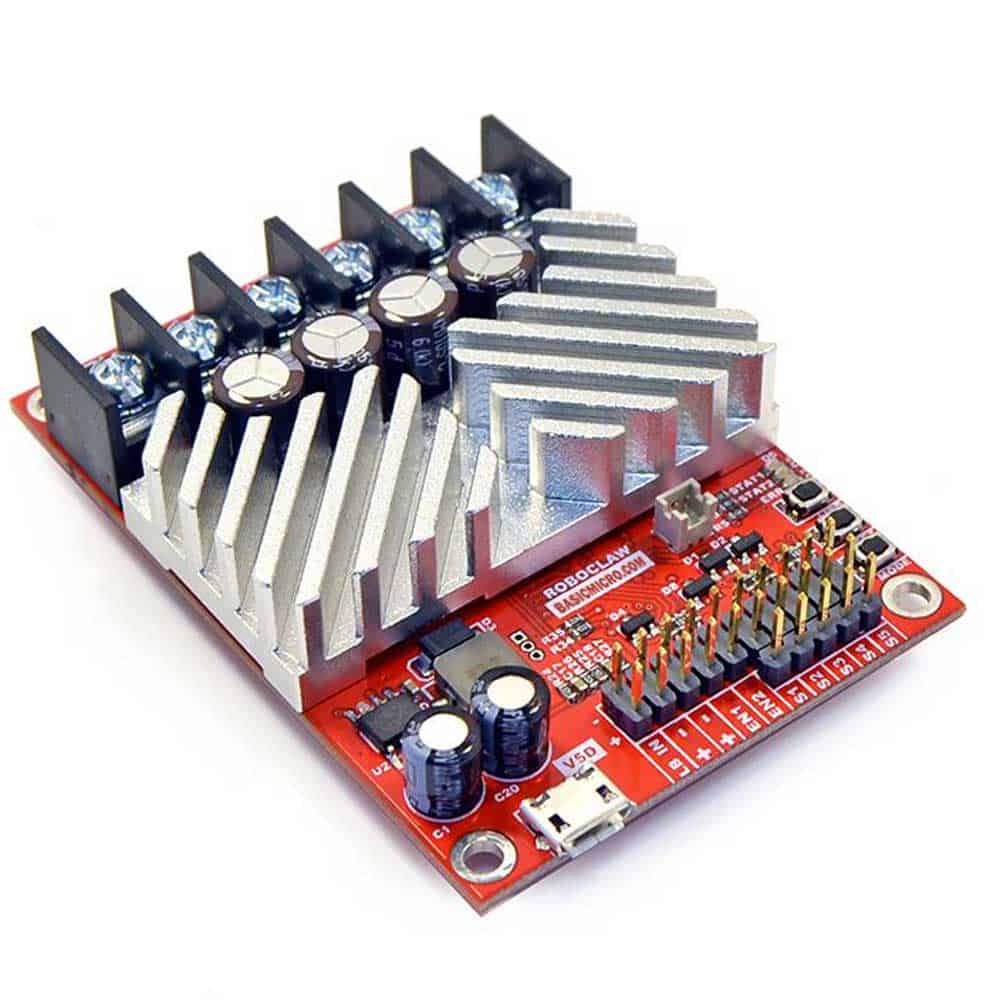
-
SuperDroid replied to the topic Motors and batteries compatibility in the forum Mechanical Design 6 years, 2 months ago
Hi Rafael, if you have the budget and space for it, I would go with IG52 motors. You could get away with using low RPM IG42 motors (78 RPM or slower) but they probably won’t last as long s the IG52’s will. As for batteries, it really depends on how much runtime you want. We often use qty. 2 12V 8Ah lead acid batteries in series with our IG42…[Read more]
-
SuperDroid wrote a new post 6 years, 2 months ago
Our budget Inspection Robots are available in Wireless and Tethered models and come equipped with an HD 1080p or better camera system with recording capabilities. See our full line of Inspection

-
SuperDroid replied to the topic TP-261-000 wheeled lawnmower kit in the forum Product Questions 6 years, 2 months ago
Hi,
Very nice build. I would say to drive the robot at half speed you can reduce the range in the appropriate channels, if you are using a spektrum remote you can download the software called spektrum programmer.
http://spektrumrc.cachefly.net/apps/Spektrum_Programmer-installer-3.3.0.0.exeYou may need this to connect to the…[Read more]
-
SuperDroid replied to the topic BLOWING A 10 AMP FUSE in the forum Product Questions 6 years, 3 months ago
Hi,
The 10A fuse is for charging, the breaker is the one you need to use for the motors and motor controller. You should have one fuse for the charger and one breaker for the rest of the electronics. -
SuperDroid wrote a new post 6 years, 3 months ago
UPDATE 04/14/2021 : We’ve added a FAQ & Support page on our main support wiki. Visit https://wiki.sdrobots.com/index.php/GPK-32 for more information.
GPK-32 Wireless Inspection Robot with 1080p HD

-
SuperDroid wrote a new post 6 years, 3 months ago
SuperDroid Robots End of Summer Sale – Bringing you the lowest prices on prebuilt robots and robotic supplies!
Regular Price: $4260.00 Sale Price: $3980.00
Regular Price: $2289.00
Sale Price:
-
SuperDroid replied to the topic SDC2130 control via PWM with encoder closed loop control problem in the forum Electrical & Controls 6 years, 3 months ago
Search the blog for posts on encoders, we have a lot of posts on this topic. This one should help you with your calculation. https://sdrobots.com/tech-thursday-029-encoder-cpr-resisted/
-
SuperDroid replied to the topic SDC2130 control via PWM with encoder closed loop control problem in the forum Electrical & Controls 6 years, 3 months ago
Usually you want to use the final geared output for both parameters. So in your case it would be 78 RPM for max speed. Then observe the encoder counts as the geared shaft approaches one revolution. This is going to give you a very high encoder count resolution for speed calculations.
You can fudge these numbers if you need higher that 1 RPM…[Read more]
-
SuperDroid replied to the topic SDC2130 control via PWM with encoder closed loop control problem in the forum Electrical & Controls 6 years, 3 months ago
Max speed should just be the max RPM of your motor. By default the acceleration and deceleration are both twice the max speed. So you could go ahead and scale these values with your max speed and leave them alone for the time being. Typically, having these values inflated will cause faster wear and tear on the mechanical components of your system…[Read more]
-
SuperDroid replied to the topic SDC2130 control via PWM with encoder closed loop control problem in the forum Electrical & Controls 6 years, 3 months ago
The encoders should be configured for Feedback. Once you set the motor operating mode to “Closed Loop Speed” you can plot the loop error in the run tab. This will useful when tuning the PID parameters. Also, make sure the “Max Speed” and “Pulses/Rev” parameters accurately reflect what your motor and encoder are capable of.
Also, make sure your…[Read more]
-
SuperDroid replied to the topic SDC2130 control via PWM with encoder closed loop control problem in the forum Electrical & Controls 6 years, 3 months ago
If you’re saying digital channel 3 is PIn3, then yes. When using encoders, please keep PIn1, PIn2, PIn5, and PIn6 disabled. Your PWM signals should be connected to pins 11 and 12 which translate to PIn3 and PIn4 in the Roborun utility.
For a USB connection there’s no need to use the Roborun utility. This is just a convenience provided by…[Read more]
-
SuperDroid replied to the topic SDC2130 control via PWM with encoder closed loop control problem in the forum Electrical & Controls 6 years, 3 months ago
Hey Dave,
Do you have the encoder channels enabled? The reason I’m asking is ENC1A and ENC1B share the same pins as RC1 and RC2. Therefore, Encoder 1 and PIn1/PIn2 should never be enabled at the same time.
At the top of Roborun you can find a “View Pinout…” button. From this you’ll see that RC5 and RC6 also share the same pins as ENC2A and…[Read more]
-
SuperDroid replied to the topic Serial connection between an Arduino and Roboteq SDC2130 in the forum Electrical & Controls 6 years, 4 months ago
Hey Dave,
See the answers to your questions below:
1. A direct connection will not work here. You need the RS-232 to TTL converter cable.
2. The only baud rate accepted by the RoboteQ MC is 115200. The Ardunio serial port has to be initialized to this rate.
3. Once the encoders have been enabled in Roborun and the configuration has been flashed…[Read more] -
SuperDroid replied to the topic Question on Wiring 4Pst Switch in the forum Electrical & Controls 6 years, 4 months ago
Hi,
In the schematic that is a 4 pole switch and each pole is rated at 25A, we have a 30A fuse in each wire, this means that the switch could burn before the fuse pop, we connected 2 poles to divide the current. But you can connect 1 wire per pole no problem or you can bridge all 4 poles together. -
SuperDroid replied to the topic Serial connection between an Arduino and Roboteq SDC2130 in the forum Electrical & Controls 6 years, 4 months ago
Hi,
We have to fix that example code, they use to have pins 6 and 7 to be ttl but now you have to use rs232. You can see the RoboteQ datasheet page 6. You can follow this wiring diagram.
https://www.superdroidrobots.com/Schematics/Roboteq_RS232.pdfThanks for letting us know.
-
SuperDroid wrote a new post 6 years, 4 months ago
Autonomous Programmable ROS SLAM Tracked Robot
SuperDroid Robots ROS SLAM Robot is a development platform designed to demonstrate the capabilities of SLAM algorithms paired with autonomous waypoint

-
SuperDroid replied to the topic SDC2160 Hook-up; info on "PwrCtrl"? in the forum Electrical & Controls 6 years, 4 months ago
Hi,
The max sink current is 1A page 11. Yes you can use it like they show on page 5, but don’t connect more than 40V in the relay coil page 5. - Load More