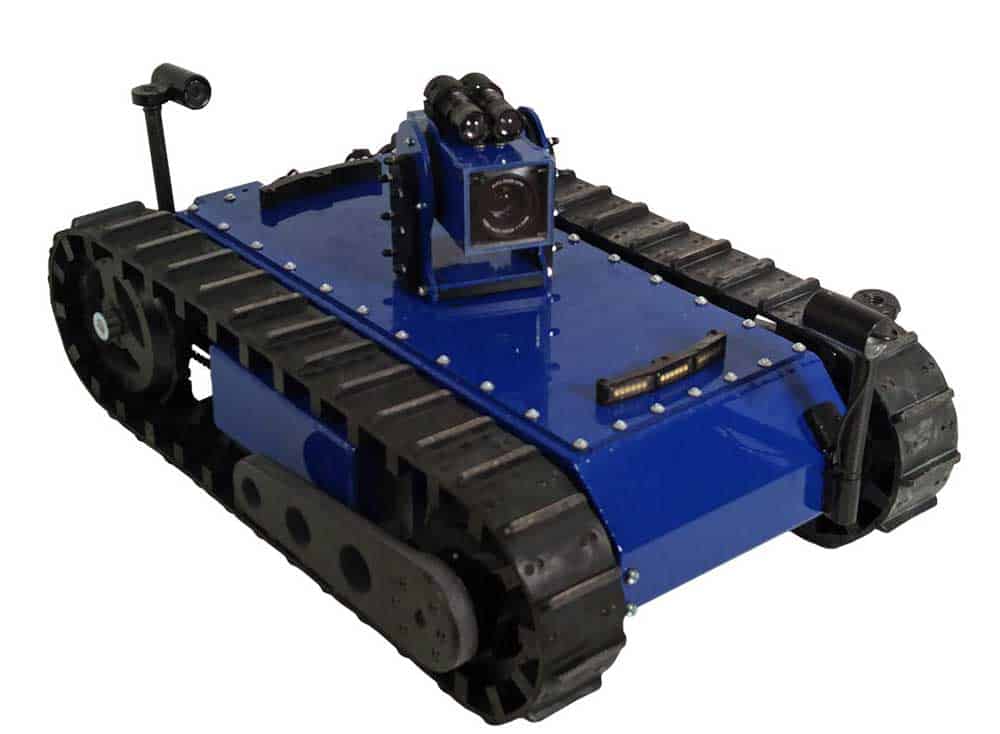
Autonomous Programmable ROS SLAM Tracked Robot


SuperDroid Robots ROS SLAM Robot is a development platform designed to demonstrate the capabilities of SLAM algorithms paired with autonomous waypoint navigation. This platform is built on the Robot Operating System (ROS). The robot is controlled using a USB gamepad and the ROS Visualization (RViz) application. Equipped with a BeagleBone Black (Rev C) running Ubuntu 16.04 and ROS Kinetic, it allows for quick and easy changes to the firmware and provides the most flexible platform possible. To get everything up and running, knowledge of ROS and basic Linux functions is a requirement.
The sensor array includes the YDLIDAR G4 and IG32 74 RPM gear motors with encoders. This data is paired with a 2D simultaneous localization and mapping (SLAM) algorithm to produce position and orientation tracking as well as 2D mapping capabilities.
Generally, wiki.ros.org is an excellent source of information full of tutorials/guides for both beginners and advanced users. If you’re just getting started with ROS, it is highly recommended to complete the beginner level tutorials.






{kind=link}