
This week, I will be explaining how to read RC pulses with an Arduino. On our robots, the most common configuration for an RC-Arduino system involves using a Spektrum transmitter + receiver combo with the receiver outputs wired to the Arduino.
Before we get into the code, you should take a moment to read about RC pulses at the top of this support page.
The code I will be referencing is available on our GitHub page. This is the program used to control our programmable triwheel vectoring robots; it basically reads RC pulses and converts them into commands for PWM motor controllers. I will post the code here and explain the relevant parts below.
/*********************************************************
Tri-Wheel Vectoring Robot with RC Control
SuperDroid Robots
December 1, 2015
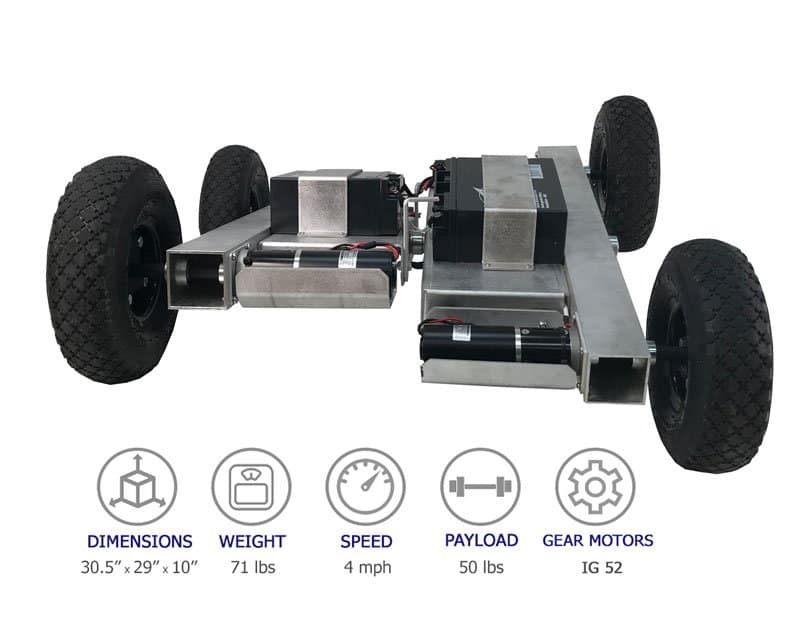
This code uses an Arduino Uno mounted on a Tri-Wheel Vectoring platform
TP-093-003. The Arduino commands three PWM motor controllers (TE-058-000)
to control three independent omni-directional wheels.
This firmware allows vectoring RC control of the robot's motion
Code is written for a Spektrum remote + receiver but could easily be reused
for other RC approaches
Platform:
http://www.superdroidrobots.com/shop/item.aspx/ig32-triangular-omni-wheel-vectoring-robot-platform/1458/
Motor Controller:
http://www.superdroidrobots.com/shop/item.aspx/pwm-motor-controller-3a-12-55v/583/
Vectoring Robot Support Page:
http://www.superdroidrobots.com/shop/custom.aspx/vectoring-robots/44/
Spektrum DX5e:
http://www.superdroidrobots.com/shop/item.aspx/spektrum-dx5etransmitter-with-ar610-receiver/992/
***********************************************************/
// Define pins for PWM motor controller
#define pwmA 6
#define dirA 7
//#define brkA 1
#define pwmB 5
#define dirB 4
//#define brkB 8
#define pwmC 3
#define dirC 2
//#define brkC 11
// Include necessary header files
#include "Arduino.h"
// Command struct for motor controllers
typedef struct {
int pulse;
bool direction;
bool brake;
} MotorValues;
// Defines structs for each motor
MotorValues motorA;
MotorValues motorB;
MotorValues motorC;
// *********************
// RC Vars
// *********************
unsigned long DRIVE_PULSE_WIDTH;
unsigned long TURN_PULSE_WIDTH;
unsigned long STRAFE_PULSE_WIDTH;
float pulseLow = 1051, pulseHigh = 1890;
// RC mappings -- strafe: aileron, drive: elevation, turn: rudder
int strafePinRC = 11, drivePinRC = 12, turnPinRC = 13;
float mFloat = 0, bFloat = 0;
float floatDeadband = 0.1;
float driveVal = 0, turnVal = 0, strafeVal = 0;
// Globals
float sideStep = 0.60; // Limiting factor to ensure direct side to side movement
float counterSteer = 1;
int rampLimit = 200;
int spdScaler = 1;
void setup() {
// Uncomment the serial command to enable debugging through serial monitor
Serial.begin(9600); // initialize serial communication at 9600 bps
// Set motor controller communication pins as outputs
pinMode(dirA, OUTPUT);
//pinMode(brkA, OUTPUT);
pinMode(dirB, OUTPUT);
//pinMode(brkB, OUTPUT);
pinMode(dirC, OUTPUT);
//pinMode(brkC, OUTPUT);
// slope/intercept for converting RC signal to range [-1,1]
mFloat = (float)2 / (pulseHigh - pulseLow);
bFloat = -1*pulseLow*mFloat;
// Command all motors to stop
allStop();
}
// Stops the Robot
void allStop() {
motorA.pulse = 0; motorB.pulse = 0; motorC.pulse = 0;
analogWrite(pwmA, 0);
analogWrite(pwmB, 0);
analogWrite(pwmC, 0);
}
// Convert RC signals to values from -1 to 1
float convertRCtoFloat(unsigned long pulseWidth) {
// deadband
if(pulseWidth > 1450 && pulseWidth < 1550) { pulseWidth = (float)(pulseHigh + pulseLow) / 2; }
float checkVal = mFloat*pulseWidth + bFloat - 1;
checkVal = checkVal < -1 ? -1 : checkVal;
checkVal = checkVal > 1 ? 1 : checkVal;
return checkVal;
}
// Scale pulse outputs
void normalizePulses()
{
float a = motorA.pulse, b = motorB.pulse, c = motorC.pulse;
float len = sqrt(a*a + b*b + c*c);
if(len < 1) { return; }
motorA.pulse = spdScaler*(float)rampLimit * a / len;
motorB.pulse = spdScaler*(float)rampLimit * b / len;
motorC.pulse = spdScaler*(float)rampLimit * c / len;
}
float getAbsolute(float val) {
val = val < 0 ? -1*val : val;
return val;
}
float addDrive(float spd) {
motorA.pulse += 0; motorB.pulse -= spd*rampLimit; motorC.pulse += spd*rampLimit;
}
float addStrafe(float spd) {
motorA.pulse += 0; motorB.pulse -= spd*rampLimit; motorC.pulse -= spd*rampLimit;
}
float addTurn(float spd) {
// countersteer to prevent rotation from strafing components
motorA.pulse = (float)(-1*motorB.pulse - motorC.pulse)*counterSteer;
// add in desired rotation based on input omega
motorA.pulse += spd*rampLimit; motorB.pulse += spd*rampLimit; motorC.pulse += spd*rampLimit;
}
float setDirection() {
bool dir = LOW;
dir = motorA.pulse > 0 ? HIGH : LOW; digitalWrite(dirA, dir);
dir = motorB.pulse > 0 ? HIGH : LOW; digitalWrite(dirB, dir);
dir = motorC.pulse > 0 ? HIGH : LOW; digitalWrite(dirC, dir);
motorA.pulse = getAbsolute(motorA.pulse);
motorB.pulse = getAbsolute(motorB.pulse);
motorC.pulse = getAbsolute(motorC.pulse);
if(motorA.pulse > spdScaler*rampLimit || motorB.pulse > spdScaler*rampLimit ||
motorC.pulse > spdScaler*rampLimit)
{
normalizePulses();
}
}
void normalizeVectors() {
float a = driveVal, b = turnVal, c = strafeVal;
float len = sqrt(a*a + b*b + c*c);
if(len < 1) { return; }
driveVal = a / len;
turnVal = b / len;
strafeVal = c / len;
}
void commandMotors() {
analogWrite(pwmA, motorA.pulse);
analogWrite(pwmB, motorB.pulse);
analogWrite(pwmC, motorC.pulse);
}
void loop()
{
// Read in the RC pulses
DRIVE_PULSE_WIDTH = pulseIn(drivePinRC, HIGH);//, PULSEIN_TIMEOUT);
TURN_PULSE_WIDTH = pulseIn(turnPinRC, HIGH);//, PULSEIN_TIMEOUT);
STRAFE_PULSE_WIDTH = pulseIn(strafePinRC, HIGH);//, PULSEIN_TIMEOUT);
// If pulses too short, stop robot
if(DRIVE_PULSE_WIDTH < 500 || TURN_PULSE_WIDTH < 500 || STRAFE_PULSE_WIDTH < 500) {
allStop();
return;
}
// convert RC signals to continuous values from [-1,1]
driveVal = convertRCtoFloat(DRIVE_PULSE_WIDTH);
turnVal = convertRCtoFloat(TURN_PULSE_WIDTH);
strafeVal = convertRCtoFloat(STRAFE_PULSE_WIDTH);
normalizeVectors();
// set motor speeds and directions //
motorA.pulse = 0; motorB.pulse = 0; motorC.pulse = 0;
// drive and strafe
if(getAbsolute(driveVal) > floatDeadband) { addDrive(driveVal); }
if(getAbsolute(strafeVal) > floatDeadband) { addStrafe(strafeVal); }
// use turn to control steering
if(getAbsolute(turnVal) > floatDeadband) { addTurn(turnVal); }
else { addTurn(0); }
// write high or low to direction pins
setDirection();
// apply pulse width to PWM outputs
commandMotors();
Serial.print(driveVal); Serial.print(","); Serial.print(turnVal); Serial.print(",");
Serial.print(strafeVal); Serial.print("\t");
Serial.print(motorA.pulse); Serial.print(",");
Serial.print(motorB.pulse); Serial.print(",");
Serial.print(motorC.pulse); Serial.print("\n");
}
The first section relevant to RC pulse reading is on lines 58-67, where the RC variables are initialized. The *_PULSE_WIDTH variables are where the raw pulse values will be stored. These will be values from about 1000-2000, representing the number of milliseconds that the pulse was high. Below these the values pulseLow and pulseHigh are declared: these are the result of calibration testing where the Spektrum’s joysticks were moved to the extremes and the max/min values were recorded. The code involves lots of scaling to convert the RC pulse values into commands for the motor controllers, which is where pulseLow and pulseHigh come into play. On line 67, the RC input pins are declared. These are the pins that the Spektrum receiver’s output signals should be wired to. Line 66 shows the receiver channel for each pin. The channel names are labeled on the receiver. Each receiver channel has 3 pins – signal, Vcc, and ground. The receiver can be powered using the Arduino’s 5V rail and ground; the signal is what needs to go to the corresponding digital pins. Note that it is not necessary to declare these pins as inputs.
The next section of interest is inside the main loop(), on lines 188-197. Here, the pins are checked for RC pulse inputs using Arduino’s pulseIn() function. I specify HIGH in the function call to indicate that the pulse duration should be counted while it is HIGH (5V) as opposed to LOW (ground). Lines 193-197 are simply verifying that a reasonable pulse duration was received.
From here, the scaling and motor mixing functions are used to apply drive, turn, and strafe values to the robot’s wheels.
{kind=link}