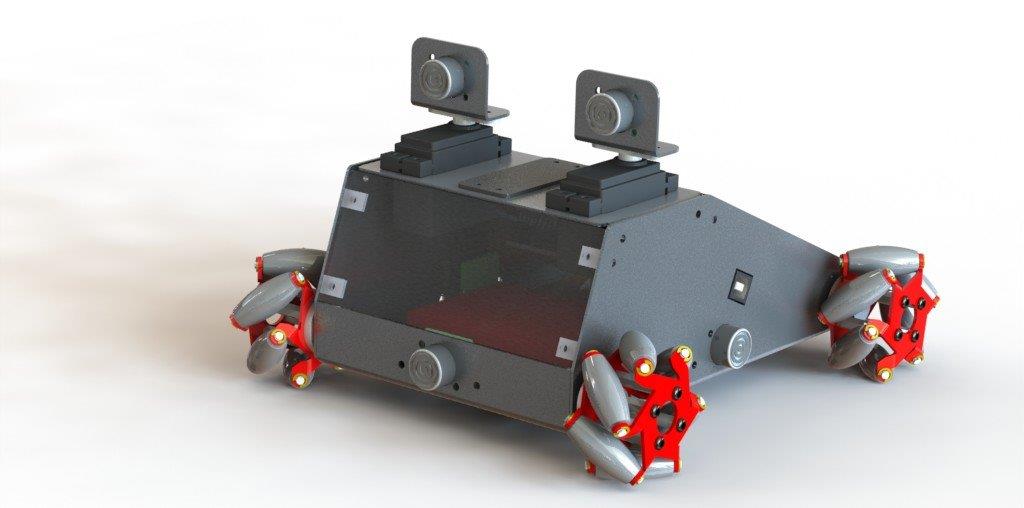
FingerTech’s 2.125 inch Mecanum Wheels
The four Mecanum wheels are each connected to a separate motor with independent control. The robot can move forward, backward and turn just like it would with four regular wheels. The configuration of rollers at 45° also allows the robot to translate sideways, and through a combination of movements, drive in any direction – even while spinning!
Adjacent corners of the robot use mirrored wheels so that they can freely roll outward from the center. This splits the force into two vectors, one forward/backward and one right/left. When the wheels on one side are spun in opposite directions, the forward and backward vectors cancel out while both sideways vectors add up. Doing the reverse with the other two wheels results in four added sideways vectors.
Control can be accomplished with a microcontroller or simply using an R/C transmitter! You can use two channel mixers, a 4-channel Mecanum drive mixer, or your own programmed PCB.
For more information about control and usage of mecanum wheels, please see our Vectoring Robot Support Page